Em consonância com o programa de internacionalização da Universidade Federal de Lavras (UFLA), o Departamento de Engenharia (DEG) tem investido em projetos multidisciplinares e de abrangência internacional. A fim de trazer contribuições representativas à sociedade e colaborar com o desenvolvimento científico aplicado, um dos projetos em andamento prevê a construção de um Laboratório de Mobilidade Terrestre (LMT), que terá como estudo prioritário o desenvolvimento de tecnologias para veículos inteligentes.
O LMT faz parte de um amplo projeto proposto pelo professor Arthur de Miranda Neto, do curso de Engenharia de Controle e Automação (DEG/UFLA), elaborado em parceria com o Instituto Vedecom (Véhicule Décarboné Communicant et sa Mobilité) e com o Laboratório Heudiasyc, da Universidade de Tecnologia de Compiègne (UTC), ambos na França. No Brasil, o projeto conta com a colaboração de membros do Laboratório de Robótica Móvel (LRM) da Universidade de São Paulo (USP – São Carlos) e do Laboratório de Mobilidade Autônoma (LMA) da Universidade de Campinas (Unicamp).
De acordo com o professor Arthur, o projeto contempla desafios contemporâneos e estratégicos para o futuro do País. Em especial, quando considerado o benefício social dos estudos propostos, já que um grande número de pessoas é vítima dos mais variados tipos de acidentes de trânsito no mundo.
Construção coletiva
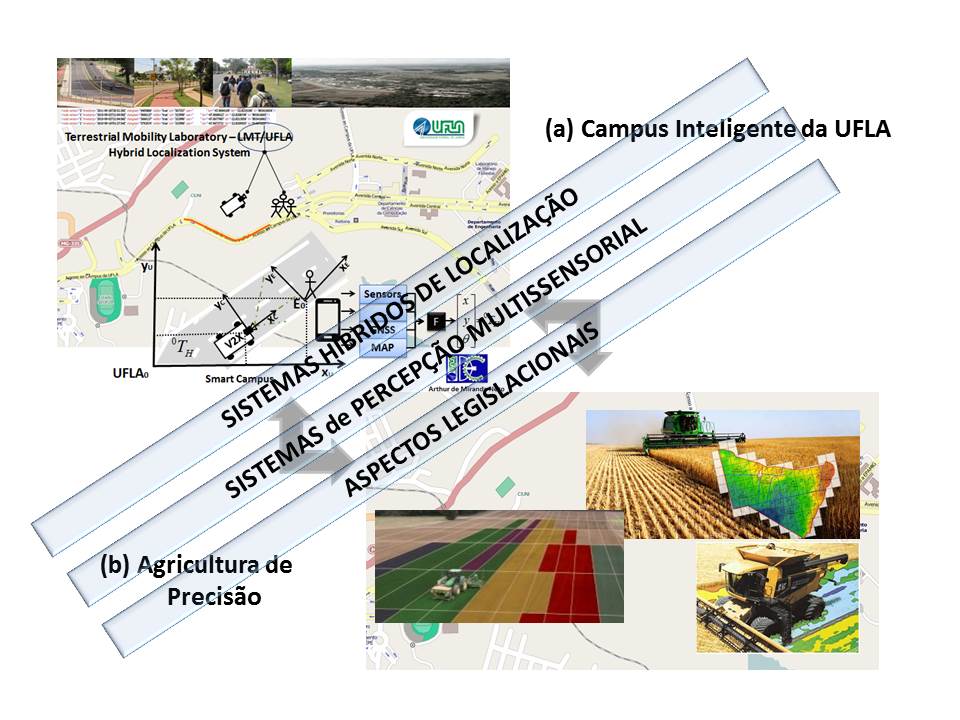
O professor explica que o LMT deverá privilegiar o ambiente multidisciplinar, sobretudo com a criação dos novos cursos de Engenharia, com a proposição de novas linhas pesquisa. Inicialmente, o projeto terá ênfase três linhas: Sistema Híbrido de Localização; Sistema de Percepção Multissensorial e Aspectos Legislacionais na utilização de Sistemas Inteligentes.
A proposta do LMT se baseia no fato de que a habilidade de reconhecer, evitar ou mitigar uma ameaça de acidente com veículos, modelando o que é provável de acontecer, pode salvar vidas, diminuindo uma parcela significativa dos acidentes. “Assim, torna-se ainda mais importante as tecnologias empregadas para o desenvolvimento de veículos inteligentes, sejam elas aplicadas aos veículos completamente autônomos ou atuando em Assistência ao Condutor (ADAS – Advanced Driver Assistance Systems)”, explica o professor.
Vale destacar que este desafio motivou a Organização das Nações Unidas (ONU) a proclamar o período entre 2011 e 2020 como a Década de Ações pela Segurança no Trânsito. No Brasil, foi lançado o Plano Nacional pela Redução de Acidentes; além de incentivos à inovação tecnológica por parte da indústria automobilística no Programa Inovar-Auto no Brasil que vigorará até 2017.
Considerando os trabalhos já desenvolvidos no Departamento de Engenharia (DEG) da UFLA, vale destacar que as linhas principais de pesquisa do LMT são comuns para veículos inteligentes em área urbana ou no campo. Em relação ao campo, especialmente na agricultura de precisão, diversas aplicações podem ser vislumbradas, como no manejo da lavoura e na aplicação de fertilizantes.
Campus Experimental Inteligente
Dentre as propostas inovadoras do LMT, está a criação do Campus Experimental Inteligente (Smart Campus), fazendo do câmpus da UFLA um projeto-piloto para a avaliação de tecnologias para a navegação segura, tanto pessoal (indivíduos), quanto de veículos. A proposta inclui a criação de Mapas Digitais Editáveis, que além de servirem de elo entre os diferentes elementos da cena, permitirão que informações relevantes (como: inclinação da via, velocidade limite, passagens de pedestres, etc.), previamente armazenadas, possam ser utilizadas em tempo real.
Para o professor Arthur de Miranda, o projeto está em harmonia com o plano de internacionalização da UFLA, destacando-se as potencialidades do LMT para o desenvolvimento de pesquisas, contribuindo para a formação de estudantes de graduação e pós-graduação.

Intercâmbio de conhecimento
Um dos parceiros no projeto é o professor Victor Hugo Etgens, da Universidade de Versailles Saint-Quentin-en-Yvelines (França) e diretor científico do Instituto Vedecom, instituição que mantém um programa multidisciplinar dedicado à pesquisa e à formação na área de mobilidade sustentável, atuando em parceria com diferentes setores da indústria e serviços e instituições de pesquisa e ensino europeus. É considerado líder em inovação nas áreas de veículos eletrificados, carros autônomos e conectados, e novas estruturas e serviços de mobilidade e energia.
Para ampliar o intercâmbio de pesquisadores com reconhecimento internacional para atuação no projeto LMT, o professor Arthur de Miranda submeteu dois projetos no âmbito do programa Ciência sem Fronteiras – Pesquisador Visitante Especial e Pesquisador Colaborador no Brasil, Bolsista Jovem Talento.
Divulgação do projeto
Em agosto de 2014, o professor Arthur de Miranda participou da organização do workshop “Veículos Conectados e Autônomos, Metas para o Futuro e Instituto Vedecom”, realizado no Instituto de Ciências Matemáticas e de Computação (ICMC) da USP – São Carlos. O evento teve a colaboração dos professores Denis Wolf (ICMC/USP) e Janito Vaqueiro Ferreira, da Faculdade de Engenharia Mecânica da Unicamp, além da participação de pesquisadores do Laboratório de Máquinas Inteligentes do Instituto Tecnológico de Aeronáutica (LMI/ITA), Centro de Tecnologia da Informação Renato Archer (CTI – Campinas) e Instituto Vedecom.
No dia 11 de setembro, o workshop “Veículos Inteligentes” foi realizado na UFLA, com a palestra do pesquisador Giovani Bernardes Victor, do Laboratório Heudiasyc da Universidade de Tecnologia de Compiègne (UTC) – França. A palestra teve como tema “Percepção do ambiente urbano e navegação usando visão robótica: concepção e implementação em um veículo autônomo”.