Atenção! Você está acessando um arquivo automático de notícias e o seu conteúdo pode estar desconfigurado. Acesse as notícias mais antigas (anteriores a Maio/2018) em nosso repositório de notícias no endereço www.ufla.br/dcom.
Pesquisador da França apresentará na UFLA projeto para concepção de veículos autônomos/inteligentes
 Visando a ampliar as parcerias com grupos de pesquisa da França, o Departamento de Engenharia da Universidade Federal de Lavras (DEG/UFLA) promoverá na próxima quinta-feira (11) uma palestra com Giovani Bernardes, pesquisador brasileiro que atua na área de veículos autônomos/inteligentes num contexto específico de sistemas de percepção usando visão computacional. Atualmente, Giovani é pesquisador no Laboratório Heudiasyc da Universidade de Tecnologia de Compiègne (UTC), na França.
A partir de outubro de 2014, atuará como pesquisador do Centre National de la Recherche Scientifique (CNRS) na França, no projeto Multimodal Perception and Reasoning for Transnational Intelligent Vehicles (Pretiv). Esse projeto se desenvolve entre a UTC - França e a Universidade de Pequim, China, financiado pela French National Research Agency (ANR) e tem como parceiros: PKU-KLMP (Peking University), e-Motion (Inria) e PSA Peugeot Citroen.
A palestra terá como tema: “Percepção do ambiente urbano e navegação usando visão robótica: concepção e implementação em um veículo autônomo”. De acordo com o professor Arthur de Miranda Neto (DEG/UFLA), idealizador da apresentação na UFLA, a robótica é uma área multidisciplinar e o tema que será apresentado poderá despertar o interesse de estudantes e professores de diferentes cursos de graduação e pós-graduação.
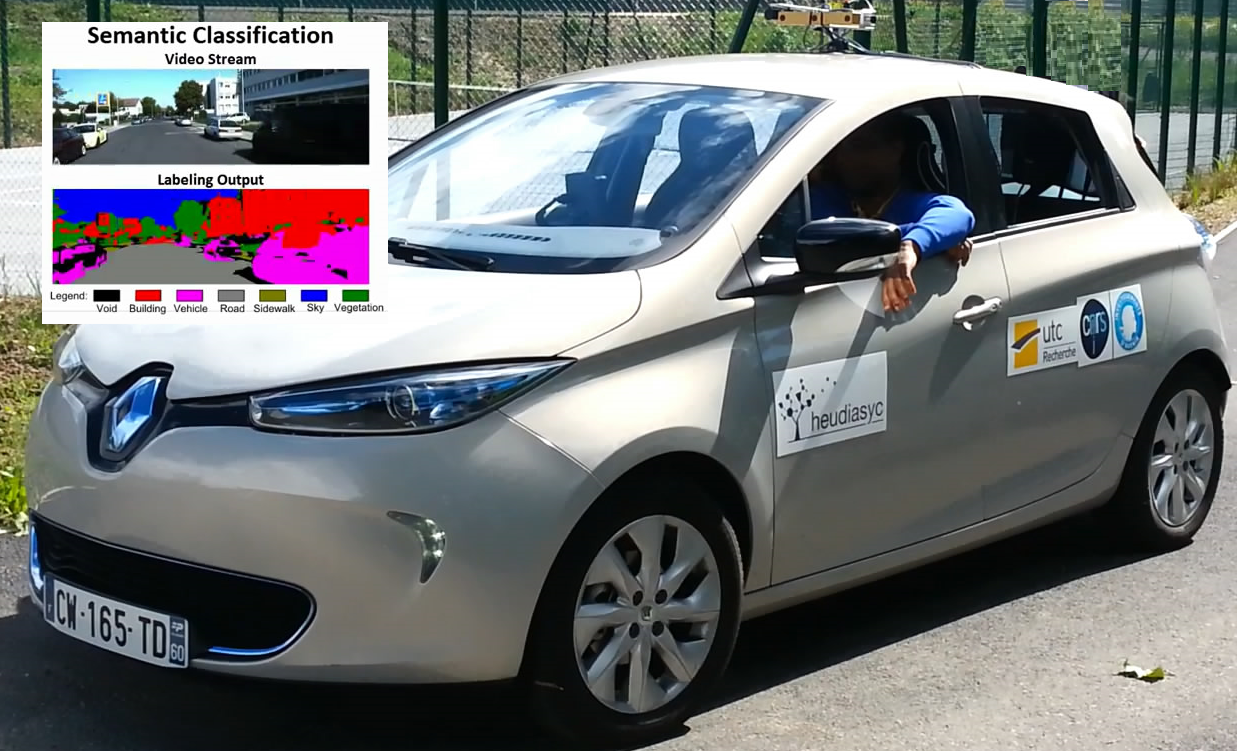
Entre os assuntos que serão abordados na palestra, a importância das pesquisas para o desenvolvimento de veículos autônomos, capazes de se locomover em ruas urbanas. Será discutido o sistema de percepção que permite o uso de veículos autônomos sem a necessidade de adaptar a sua infraestrutura, sem o conhecimento prévio do ambiente e considerando a presença de objetos dinâmicos. No projeto, Giovani Bernardes propõe um novo método baseado em aprendizado de máquina para extrair o contexto semântico usando apenas um par de imagens estéreo, vinculado a uma grade de ocupação evidencial que modela as incertezas de um desconhecido ambiente urbano, aplicando a teoria de Dempster-Shafer. Para a tomada de decisão no planejamento do caminho a ser seguido, propõe-se uma solução baseada na estratégia de tentáculos para melhor evitar os obstáculos e seguir a tarefa local.
A apresentação será às 9 horas, no anfiteatro do DEG. Giovani Bernardes realizará uma apresentação em português, com tempo previsto entre 30 e 40 minutos, na sequência haverá tempo para debate.
DATA: 11/9/2014, quinta-feira, 9 horas
LOCAL: Anfiteatro do Departamento de Engenharia DEG/UFLA
Visando a ampliar as parcerias com grupos de pesquisa da França, o Departamento de Engenharia da Universidade Federal de Lavras (DEG/UFLA) promoverá na próxima quinta-feira (11) uma palestra com Giovani Bernardes, pesquisador brasileiro que atua na área de veículos autônomos/inteligentes num contexto específico de sistemas de percepção usando visão computacional. Atualmente, Giovani é pesquisador no Laboratório Heudiasyc da Universidade de Tecnologia de Compiègne (UTC), na França.
A partir de outubro de 2014, atuará como pesquisador do Centre National de la Recherche Scientifique (CNRS) na França, no projeto Multimodal Perception and Reasoning for Transnational Intelligent Vehicles (Pretiv). Esse projeto se desenvolve entre a UTC - França e a Universidade de Pequim, China, financiado pela French National Research Agency (ANR) e tem como parceiros: PKU-KLMP (Peking University), e-Motion (Inria) e PSA Peugeot Citroen.
A palestra terá como tema: “Percepção do ambiente urbano e navegação usando visão robótica: concepção e implementação em um veículo autônomo”. De acordo com o professor Arthur de Miranda Neto (DEG/UFLA), idealizador da apresentação na UFLA, a robótica é uma área multidisciplinar e o tema que será apresentado poderá despertar o interesse de estudantes e professores de diferentes cursos de graduação e pós-graduação.
Entre os assuntos que serão abordados na palestra, a importância das pesquisas para o desenvolvimento de veículos autônomos, capazes de se locomover em ruas urbanas. Será discutido o sistema de percepção que permite o uso de veículos autônomos sem a necessidade de adaptar a sua infraestrutura, sem o conhecimento prévio do ambiente e considerando a presença de objetos dinâmicos. No projeto, Giovani Bernardes propõe um novo método baseado em aprendizado de máquina para extrair o contexto semântico usando apenas um par de imagens estéreo, vinculado a uma grade de ocupação evidencial que modela as incertezas de um desconhecido ambiente urbano, aplicando a teoria de Dempster-Shafer. Para a tomada de decisão no planejamento do caminho a ser seguido, propõe-se uma solução baseada na estratégia de tentáculos para melhor evitar os obstáculos e seguir a tarefa local.
A apresentação será às 9 horas, no anfiteatro do DEG. Giovani Bernardes realizará uma apresentação em português, com tempo previsto entre 30 e 40 minutos, na sequência haverá tempo para debate.
DATA: 11/9/2014, quinta-feira, 9 horas
LOCAL: Anfiteatro do Departamento de Engenharia DEG/UFLA
Atenção! As notícias mais antigas (anteriores a Maio/2018) estão disponíveis em nosso repositório de notícias no endereço www.ufla.br/dcom.